সূত্র- ভেক্টর (Vector)
ভেক্টরের যোগ
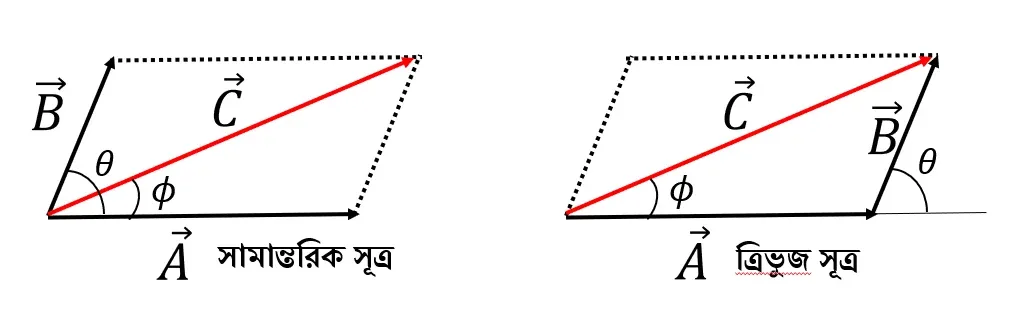
\overrightarrow{A} + \overrightarrow{B} = \overrightarrow{C}
লব্ধি ভেক্টরের মান, C = \sqrt{A^2 + B^2 + 2ABcos\theta }
লব্ধি ভেক্টরের অভিমুখ, tan \phi = \frac{Bsin\theta}{A + Bcos\theta}
ভেক্টরের লম্ব উপাংশে বিভাজন

P=Rcos\theta, Q=Rsin\theta
ভেক্টরের বিয়োগ

\overrightarrow{C}=\overrightarrow{A} -\overrightarrow{B} = \overrightarrow{A} +(-\overrightarrow{B})
লব্ধি ভেক্টরের মান, C = \sqrt{A^2 + B^2 + 2ABcos(\pi-\theta)}= \sqrt{A^2 + B^2 -2ABcos\theta}
লব্ধি ভেক্টরের অভিমুখ, tan \phi = \frac{Bsin\theta}{A - Bcos\theta}
ভেক্টরের ডট (.) গুণ
\overrightarrow{A} = A_1\widehat{i} + A_2\widehat{j} + A_3\widehat{k}, \overrightarrow{B} = B_1\widehat{i} + B_2\widehat{j} + B_3\widehat{k},
\overrightarrow{A}\ldotp \overrightarrow{B} = A_1B_1 + A_2B_2 + A_3B_3
ভেক্টরের ক্রস (×) গুণ
\overrightarrow{A} = A_1\widehat{i} + A_2\widehat{j} + A_3\widehat{k}, \overrightarrow{B} = B_1\widehat{i} + B_2\widehat{j} + B_3\widehat{k},
\overrightarrow{A}\times \overrightarrow{B} =\left|\begin{array}{cc} \widehat{i} & \widehat{j} & \widehat{k} \\ A_1 & A_2 & A_3 \\ B_1 & B_2 & B_3 \\ \end{array}\right|
=(A_2B_3 - A_3B_2)\widehat{i} - (A_1B_3 - A_3B_1)\widehat{j} + (A_1B_2 - A_2B_1)\widehat{k}



 ABC প্রিজমের প্রতিসারক কোণ ∠A। PQ রশ্মি AC তলে ∠
ABC প্রিজমের প্রতিসারক কোণ ∠A। PQ রশ্মি AC তলে ∠